Design of a Laser SLAM System Based on LeGO-LOAM
Introduction
This is a course I took during my graduate studies, titled Robot Control Theory and Technology. The final assessment involved the teacher presenting multiple robotics-related topics, from which students could choose one to conduct experiments and write a course paper. I selected a topic related to laser SLAM, and the specific requirements are as follows:
🌞 Aims:
- Complete a LiDAR-based SLAM program under the ROS system
- Discuss and compared current centralized LiDAR SLAM methods
- Write a technical report
📝 Advisor: Prof. Yifei Wu
📅 Duration: May. 2023 - Jun. 2023
Contributions
- Designed a system based on the mainstream open-source LiDAR SLAM framework LeGO-LOAM and ROS, becoming familiar with both the system principles and code.
- Added a pose-saving function to LeGO-LOAM for comparison with ground truth, based on an in-depth understanding of the code.
- Set up the required software environment for experiments, including installing Ubuntu 18.04, ROS-melodic, and dependencies like Gtsam, PCL, and OpenCV.
- Tested the system using the KITTI dataset, viewing the generated 3D point cloud map in real-time in RViz.
- Compared ground truth poses with estimated poses using the evo tool.
Outcomes
A course report that received a score of 98, ranking 1/90 in the class, which can be access at the following link:
Project Showcase
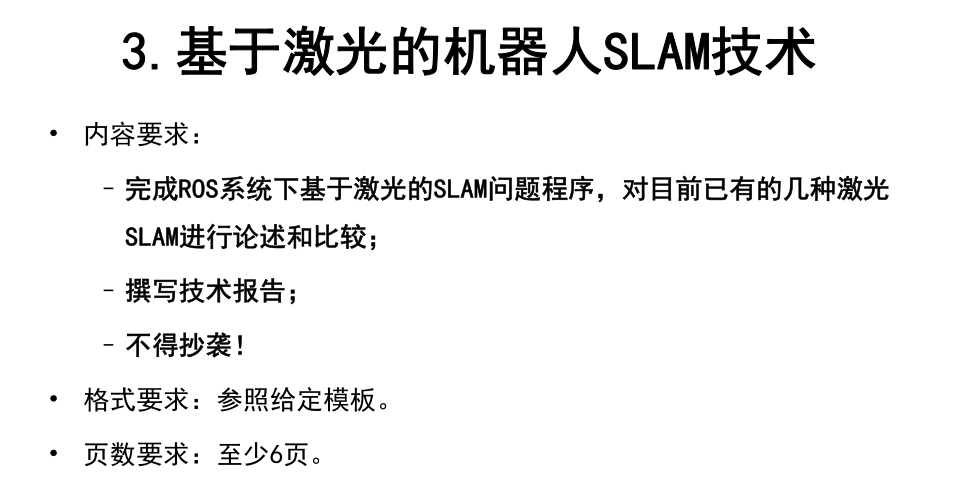
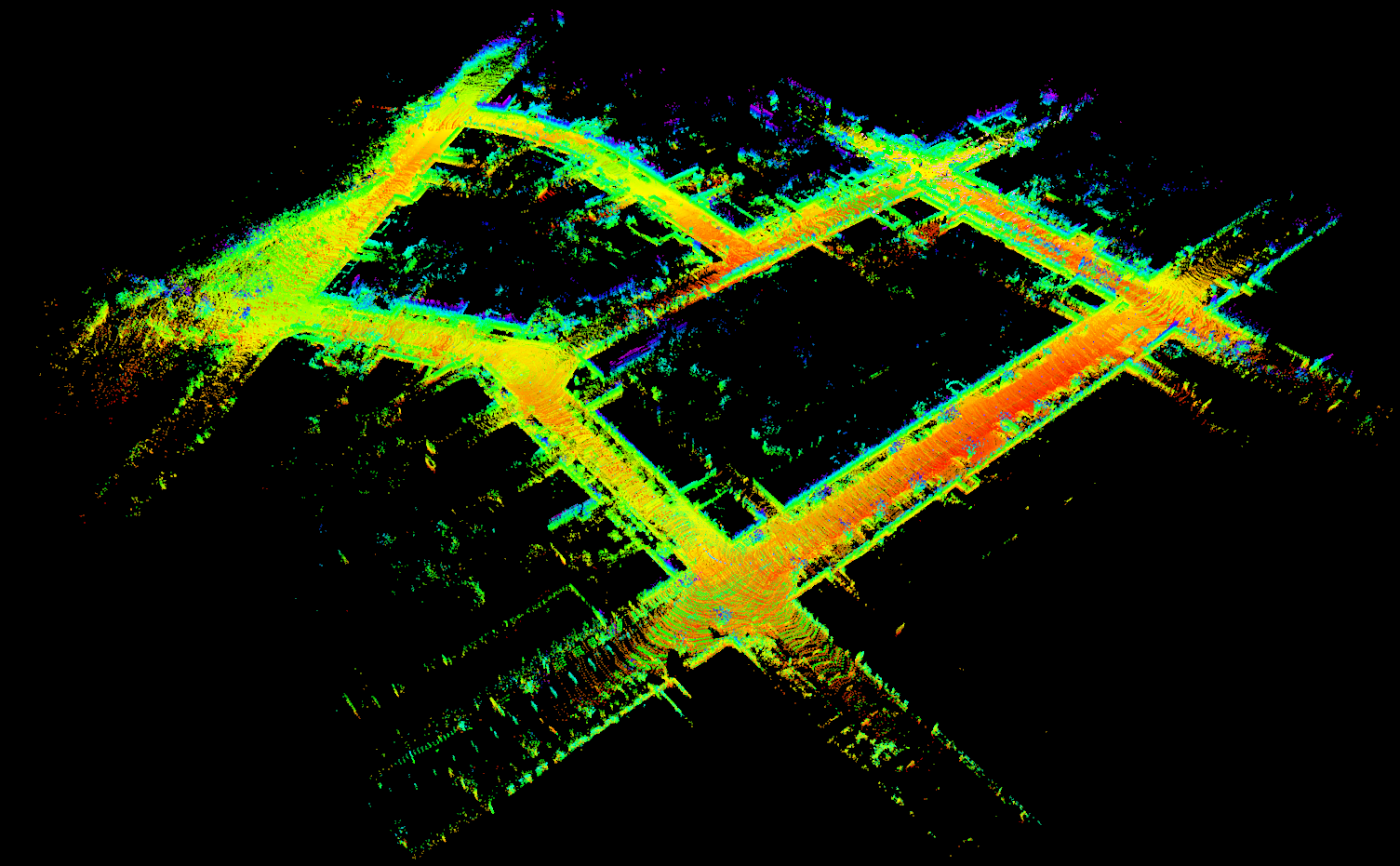
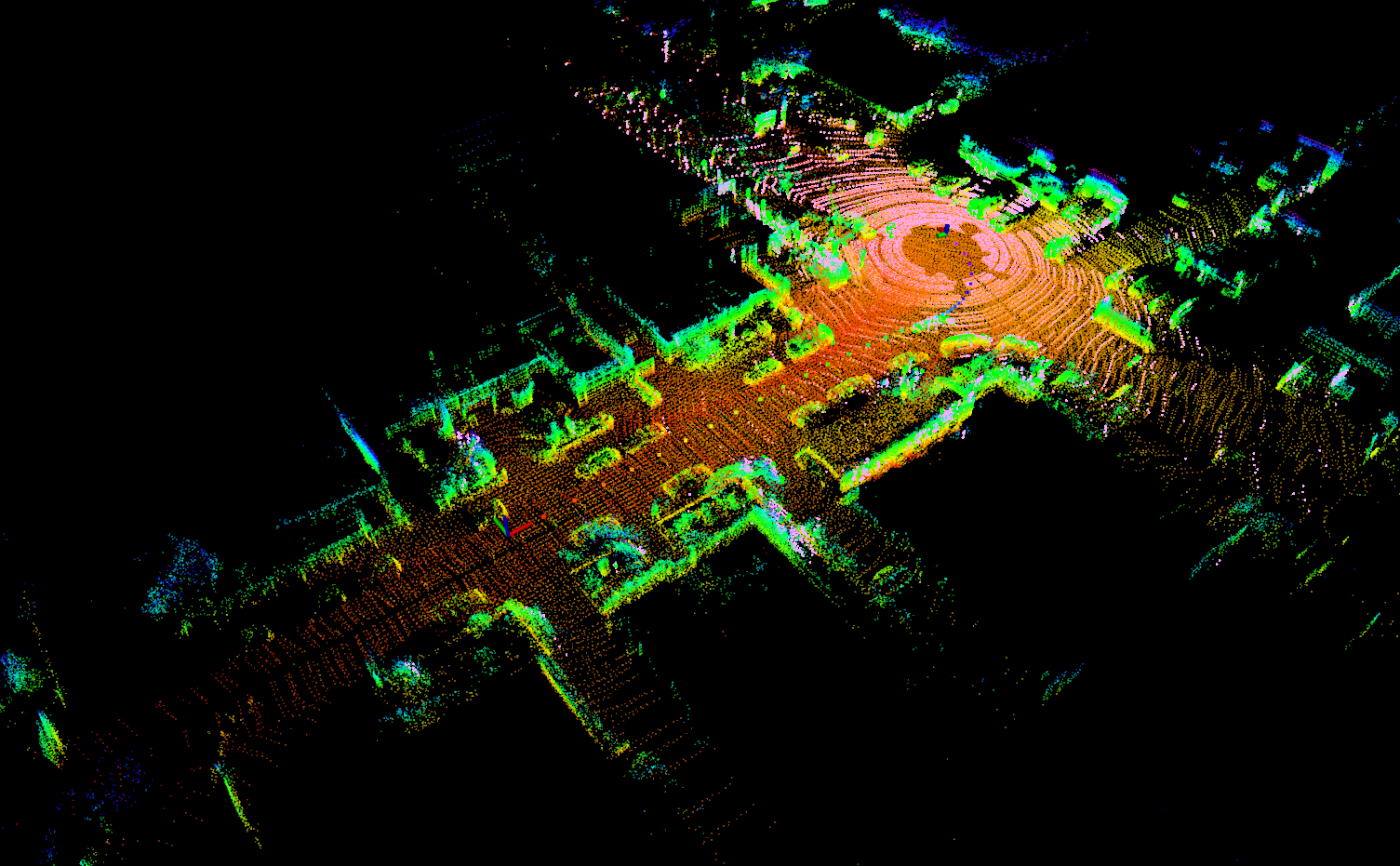
Results of 3D point cloud map:
Results of localization:
.png)
.png)