Wheeled-Legged Amphibious Robot Project
Introduction
🌞 Aims:
- Design and make the physical prototype of wheeled-legged robot.
- Design a effective balance control algorithm based for the designed wheeled-legged robot.
📝 Advisor: Prof. Yifei Wu
📅 Duration: Feb. 2023 - Apr. 2023
Contributions
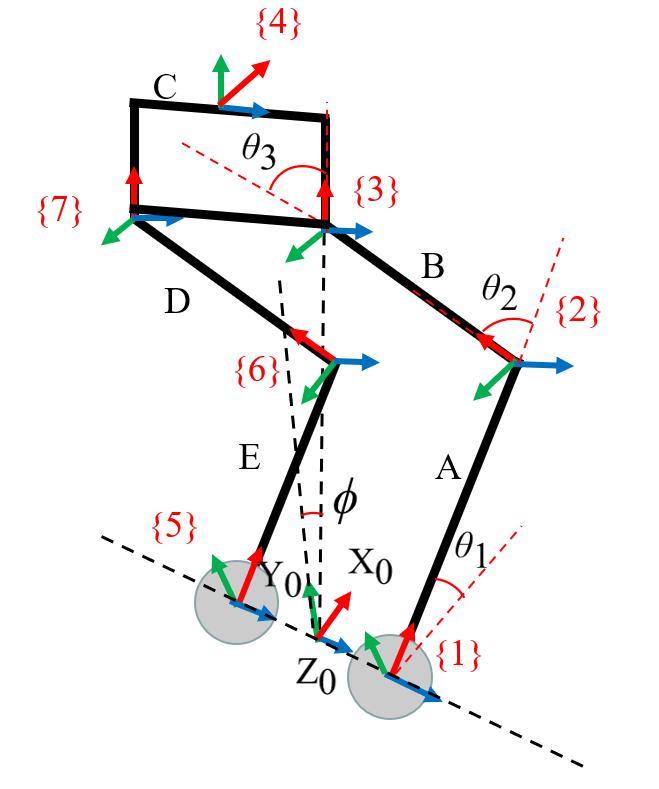
- Conducted forward and inverse kinematics analysis of the robot using the D-H method, and established kinematic and dynamic models considering joint center of mass constraints.
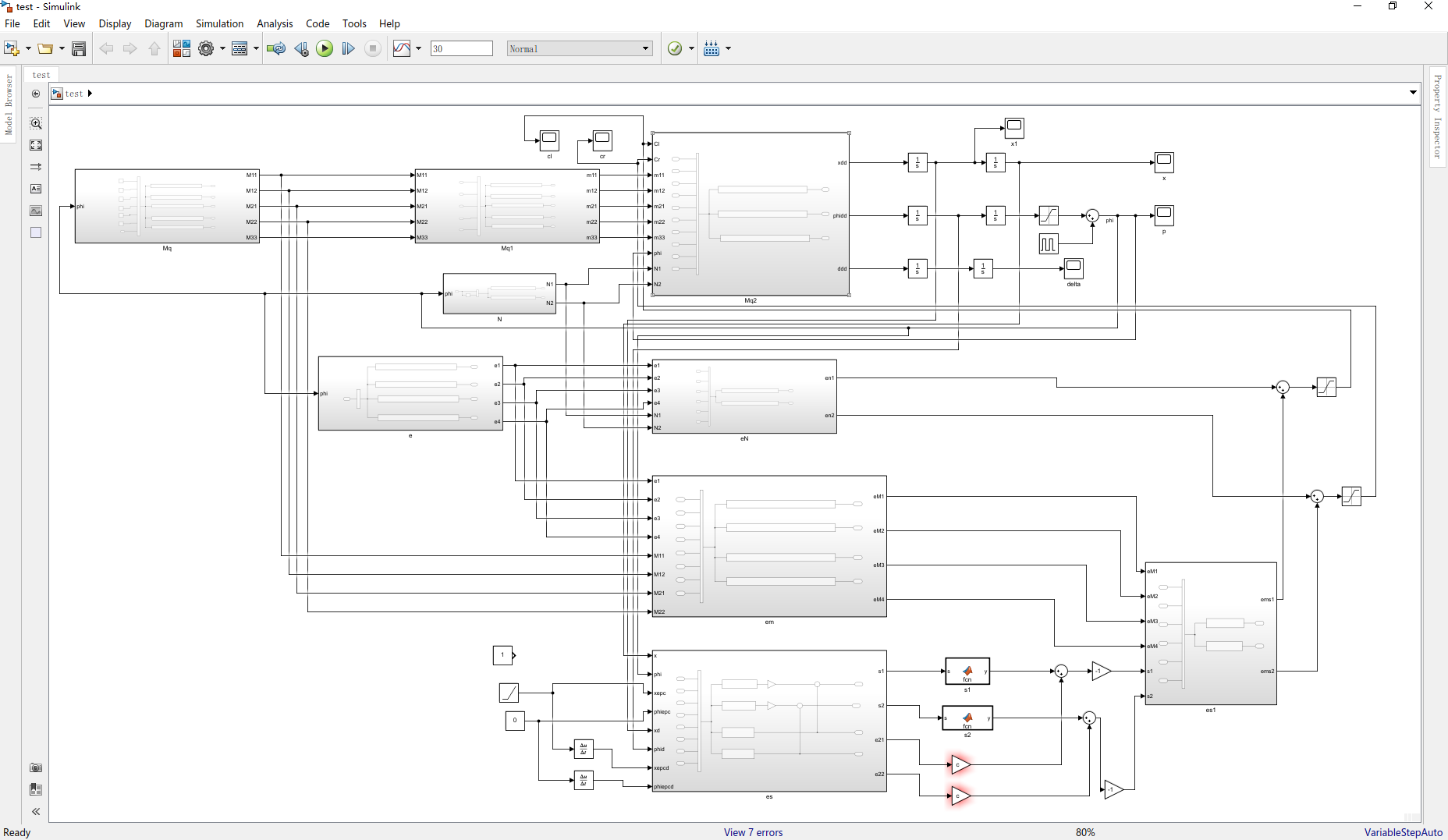
- Designed a super-helical sliding mode balance controller based on the robot modeling results, and verified the balance algorithm through simulations in Simulink.
- Designed and developed the robot’s hardware circuitry. Built an air-ground integrated experimental prototype of the robot.
Conclusion
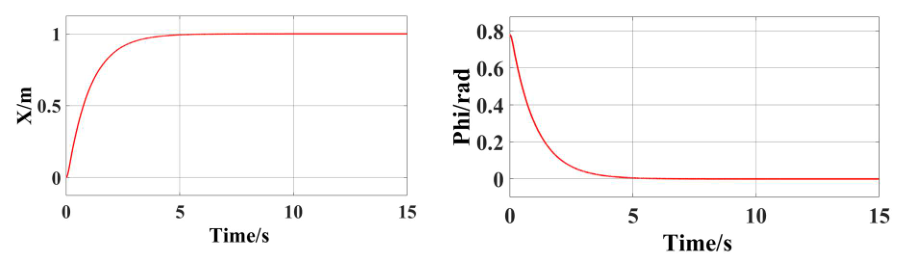
Concluded that the designed balance controller quickly converges to the desired position or speed, exhibits strong disturbance rejection during air-to-ground transitions, and maintains robustness when the robot’s height changes.
Outcomes
- A patent (A Wheel-Legged Air-Ground Integrated Robot Based On Super-Spiral Sliding Form.)
- An experimental prototype of the robot
Project Showcase
Conceptual diagram of the robot design:
Hardware circuitry for the robot’s wheel leg section:
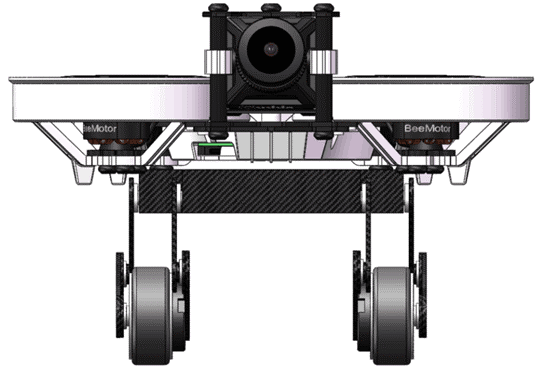
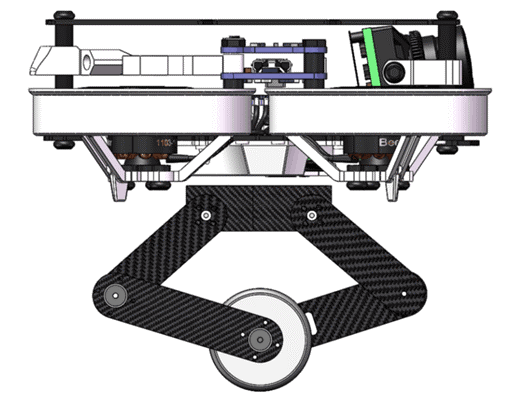
The designed amphibious air-ground robot:
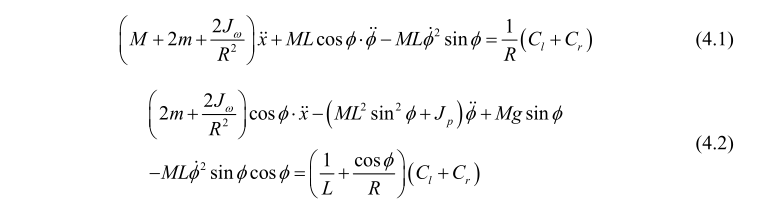
Mathematical model of the robot
The balancing of the robot involves only position and inclination control.
Using $x$ and $\phi$ represent the position and inclination of the robot, $C_l$ and $C_r$ represent the left and right motor torque, we can get the mathematical model of the robot as following
(More details are coming soon …)
Simulink-based simulation model of super-helical sliding mode control algorithm:
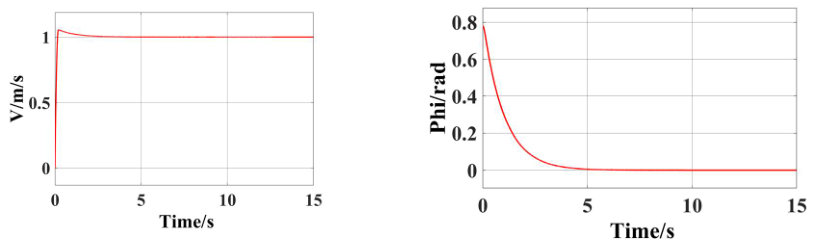
Partial simulation results:
The targst position is 1m and the initial inclination is $\frac{\pi}{4}$:
The targst velocity is 1m/s and the initial inclination is $\frac{\pi}{4}$:
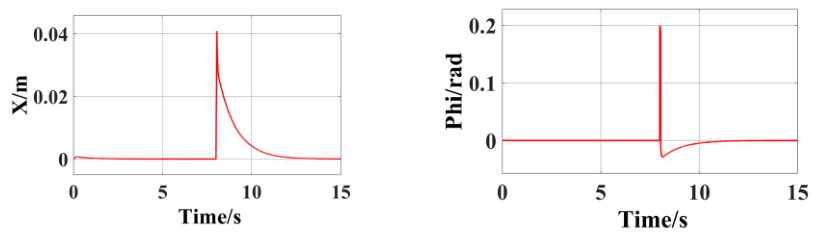
The immunity is tested by equating the instant of air-ground mode switching to a perturbation signal:

.jpg)
.jpg)
.jpg)
.jpg)