Dynamic Visual SLAM Project
Introduction
🌞 Aims:
- Addressing the impact of highly dynamic objects on SLAM system performance.
- Solving the problem of unknown dynamic object recognition when semantic segmentation network fails.
- Overcoming the limitation of SLAM systems in generating dense point cloud maps under dynamic scenes.
📝 Advisor: Prof. Yifei Wu
📅 Duration: Mar. 2024 - present
Contributions
- Embedded the ANN semantic segmentation network into ORB-SLAM2 by leveraging ROS framework to identify common dynamic objects.
- Proposed an unknown dynamic object recognition algorithm combining depth map clustering and multi-view geometry, enabling accurate dynamic object recognition when the semantic segmentation network fails.
- Designed a strategy to remove dynamic features using semantic information and dynamic depth clusters, improving localization accuracy and map quality.
- Developed a static point cloud map creating thread to construct high-quality maps in dynamic environments.
Conclusion
- Localization: Experimental results on TUM and Bonn datasets show top or second accuracy compared to most mainstream dynamic SLAM algorithms. Over 90% improvement in localization accuracy on TUM dataset versus ORB-SLAM2, with minimum ATE of 0.0072m. Accuracy improved up to 70% compared to semantic-only methods.
- Map creation: The proposed system is capable of constructing high-quality static dense point cloud maps in dynamic environments.
Outcomes
- A complete novel RGB-D visual SLAM system with improved accuracy, robustness, and environmental awareness in highly dynamic scenarios.
- A journal-type paper. (IEEE Transactions on Instrumentation & Measurement, JCR-Q1, Under review)
- A conference-type paper. (Accepted at the 22nd IEEE International Conference on Industrial Informatics (IEEE-INDIN 2024))
Project Showcase
Robot used for experiments:
.jpg)
Front |
.jpg)
Back |
Experimental processing and results:
Since the relevant papers are still under review, some experimental results are present here:
Experimental results of TUM dataset:
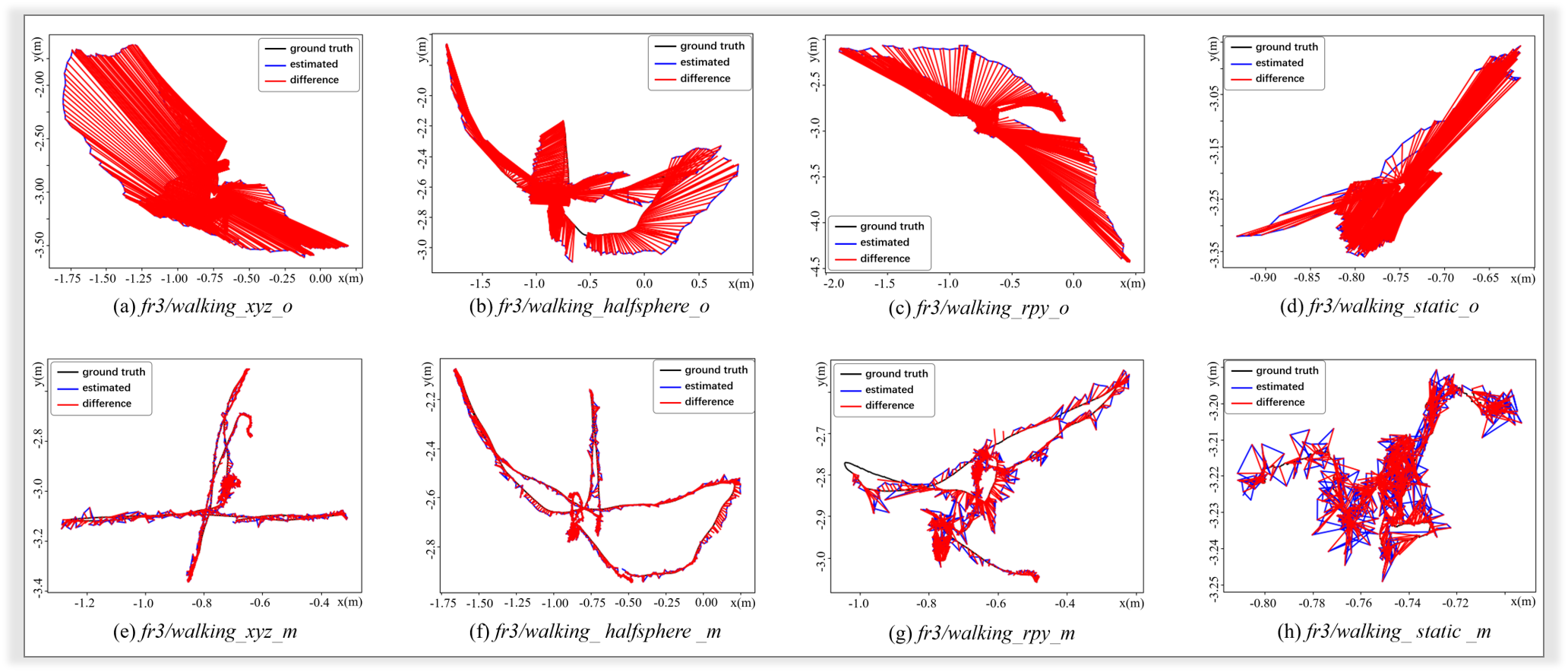
ATE results of ORB SLAM2 and the proposed system running four sequences. (a) – (d) are trajectories generated by ORB_SLAM2 under four dynamic data sequences while (e) – (h) are results generated by the proposed system using the same corresponding data.
Experimental results of map creation in practice:
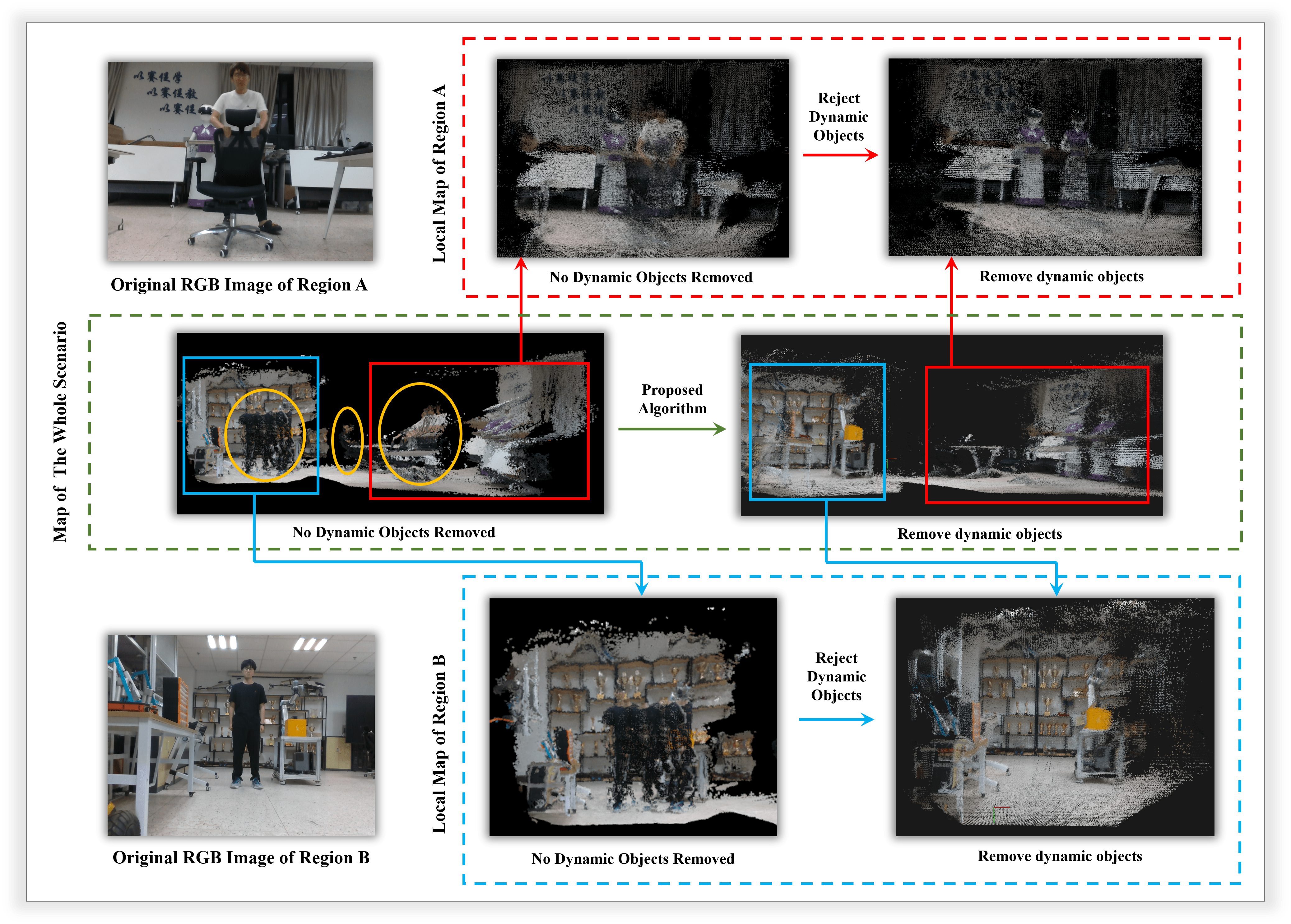
The comparison of the dense point cloud mapping results in practical environment. The map of whole scenario is marked with a green dashed box. Regions A and B are marked with red and blue dash boxes respectively. Excluded dynamic point clouds are marked with yellow circles.